еҸҜд»ҘйҖҡиҝҮзӣҙжҺҘд»ҺPCе’ҢPLCзӯүеҗ„з§Қи®ҫеӨҮеҗ‘жңәеҷЁдәәеҸ‘йҖҒиҝҗеҠЁе‘Ҫд»ӨеҢ…жқҘжҺ§еҲ¶жңәеҷЁдәәгҖӮ
b-CAP д»ҺжЁЎејҸ
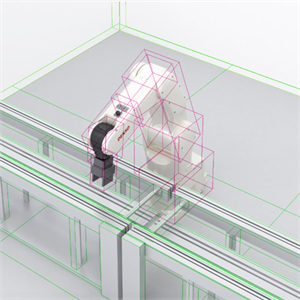
иҜҘеҠҹиғҪйҖҡиҝҮд»Ҙиҫғзҹӯзҡ„ж—¶й—ҙй—ҙйҡ”дј иҫ“дҪҚзҪ®е’Ңе§ҝжҖҒж•°жҚ®жқҘж“ҚдҪңжңәеҷЁдәәгҖӮ
е®ўжҲ·з«ҜйҖҡиҝҮжҢүйЎәеәҸжҢҮе®ҡжңәеҷЁдәәзҡ„е§ҝеҠҝжқҘе®һж—¶жҺ§еҲ¶жңәеҷЁдәәгҖӮ жӯӨеҠҹиғҪе…Ғи®ёе®ўжҲ·з«ҜиҮӘз”ұж“ҚзәөжңәеҷЁдәәзҡ„иҪЁиҝ№гҖӮ
жӣҙеӨҡиҜҰжғ…иҜ·е’ЁиҜўпјҡ15717506805пјҲеҫ®дҝЎеҗҢеҸ·пјү
 жү©еұ•еҠҹиғҪ
жү©еұ•еҠҹиғҪ  зҢңдҪ е–ңж¬ў
зҢңдҪ е–ңж¬ў


 925
925