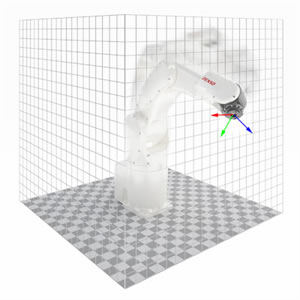
жӯЈеёёжүӢеҠЁжЁЎејҸдёӢзҡ„ж—ӢиҪ¬иҝҗеҠЁд»Ҙж—ӢиҪ¬иҝҗеҠЁжү§иЎҢпјҢиҖҢдёҚж”№еҸҳжүӢйғЁдҪҚзҪ®еқҗж ҮгҖӮ йҖҡиҝҮдҪҝз”ЁеӨ–йғЁTCPеҠҹиғҪпјҢ
еҸҜд»Ҙеӣҙз»•и®ҫзҪ®зҡ„е·Ҙ件еқҗж ҮеҺҹзӮ№ж—ӢиҪ¬гҖӮ
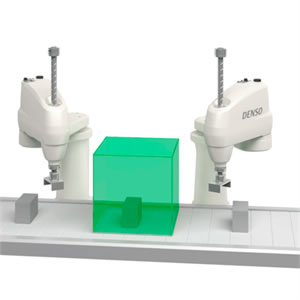
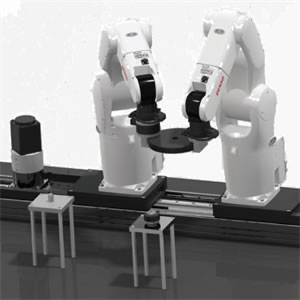
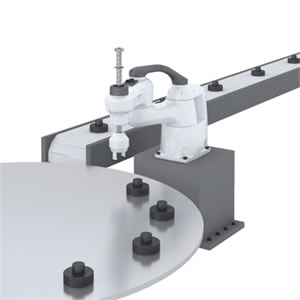
еҪ“жңәеҷЁдәәжғіиҰҒеӨ№дҪҸе·Ҙ件并жү§иЎҢCPиҝҗеҠЁпјҲзӣҙзәҝе’ҢеңҶеј§пјүж—¶пјҢеӨ–йғЁTCPеҠҹиғҪ
еҸҜд»ҘеҮҸе°‘зӨәж•ҷзӮ№зҡ„ж•°йҮҸпјҢдҫӢеҰӮдҪҝз”Ёеӣәе®ҡеңЁи®ҫеӨҮдёҠзҡ„йІҒзү№еҜ№е·Ҙ件иҝӣиЎҢеҺ»жҜӣеҲәж—¶пјҢжҲ–иҖ…дҪҝз”Ёеӣәе®ҡеҜҶе°ҒжһӘеҜ№е·Ҙ件иҝӣиЎҢ
еҜҶе°Ғж—¶гҖӮ
жӣҙеӨҡиҜҰжғ…иҜ·е’ЁиҜўпјҡ15717506805пјҲеҫ®дҝЎеҗҢеҸ·пјү
 жү©еұ•еҠҹиғҪ
жү©еұ•еҠҹиғҪ  зҢңдҪ е–ңж¬ў
зҢңдҪ е–ңж¬ў


 844
844