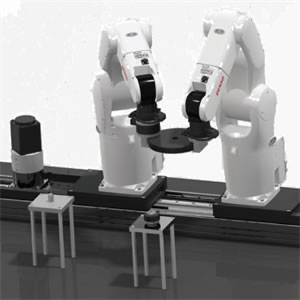
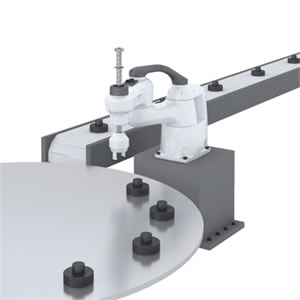
жңәеҷЁдәәи·ҹйҡҸе·Ҙ件пјҢеҸҜд»ҘеңЁдёҚеҒңжӯўиҫ“йҖҒжңәзҡ„жғ…еҶөдёӢиҝӣиЎҢиҝҗиҫ“е’ҢеҜ№йҪҗгҖӮ
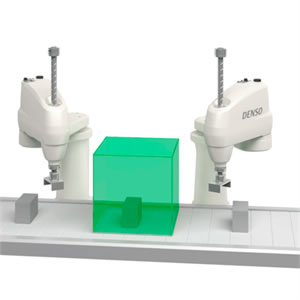
дј ж„ҹеҷЁи·ҹиёӘ
е®ғз”ЁдәҺжӢҫеҸ–д»Ҙд»»ж„Ҹй—ҙйҡ”зӣҙзәҝ移еҠЁзҡ„е·Ҙ件гҖӮ еҪ“е·Ҙ件з©ҝиҝҮе…үз”өдј ж„ҹеҷЁеүҚйқўж—¶пјҢдҝЎеҸ·з”ЁдҪңи§ҰеҸ‘еҷЁгҖӮ еҪ“е·Ҙ件еңЁе…үз”өдј ж„ҹеҷЁеүҚдәӨеҸүж—¶пјҢйў„е…Ҳи®°еҪ•е·Ҙ件зҡ„дҪҚзҪ®пјҢжҜҸж¬Ўж–ҪеҠ жүіжңәж—¶пјҢжңәеҷЁдәәйғҪдјҡдҫқж¬Ўи®Ўз®—е·Ҙ件зҡ„жөҒеҗ‘пјҢдҪҝжңәеҷЁдәәи·ҹйҡҸгҖӮ
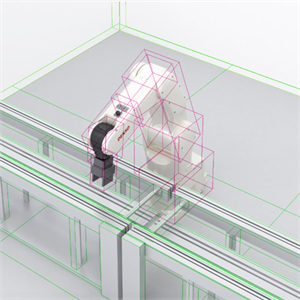
и§Ҷи§үиҝҪиёӘ
е®ғз”ЁдәҺжӢҫеҸ–ж”ҫзҪ®еңЁд»»ж„ҸдҪҚзҪ®е’Ңе§ҝеҠҝзҡ„е·Ҙ件гҖӮ
еҪ“и§Ҷи§үдј ж„ҹеҷЁйҖҡиҝҮеӣҫеғҸиҜҶеҲ«жЈҖжөӢеҲ°е·Ҙ件时пјҢе®ғдјҡи§ҰеҸ‘дҝЎеҸ·гҖӮ
жҜҸж¬Ўж–ҪеҠ и§ҰеҸ‘еҷЁж—¶пјҢйғҪдјҡи®°еҪ•йҖҡиҝҮеӣҫеғҸиҜҶеҲ«жЈҖжөӢеҲ°зҡ„е·Ҙ件зҡ„дҪҚзҪ®е’Ңе§ҝеҠҝпјҢжңәеҷЁдәәйҖҡиҝҮйЎәеәҸи®Ўз®—е·Ҙ件зҡ„жөҒеҠЁдҪҚзҪ®жқҘи·ҹйҡҸжңәеҷЁдәәгҖӮ
жӣҙеӨҡиҜҰжғ…иҜ·е’ЁиҜўпјҡ15717506805пјҲеҫ®дҝЎеҗҢеҸ·пјү
 жү©еұ•еҠҹиғҪ
жү©еұ•еҠҹиғҪ  зҢңдҪ е–ңж¬ў
зҢңдҪ е–ңж¬ў





 542
542