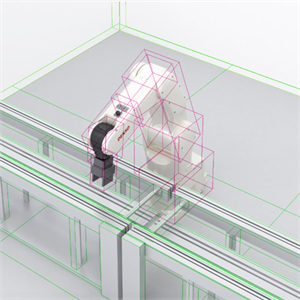
еҪ“йңҖиҰҒзәҝжҖ§е®ҢжҲҗд»ҘйҖҡиҝҮжңәеҷЁдәәе§ҝеҠҝеҸҳеҢ–зҡ„зӮ№пјҲдҫӢеҰӮеҘҮзӮ№йҷ„иҝ‘пјүж—¶пјҢеҸҜд»ҘдҪҝз”Ёе®ғиҝӣиЎҢе№іж»‘ж“ҚдҪңгҖӮ
еҪ“еңЁCPиҝҗеҠЁдёӯйҖҡиҝҮеҘҮзӮ№жҲ–жҺҘиҝ‘еҘҮзӮ№ж—¶пјҢзү№е®ҡиҪҙиҜ•еӣҫеңЁзһ¬й—ҙеҝ«йҖҹ移еҠЁ
д»ҘдҝқжҢҒе…¶еҪўжҖҒгҖӮ еӣ жӯӨпјҢе®ғе°ҶеҜјиҮҙйҖҹеәҰи¶…иҝҮе’ҢиҪҜйҷҗеҲ¶й”ҷиҜҜгҖӮ
йҒҝе…Қз”ұиҝҷз§ҚеҘҮзӮ№еј•иө·зҡ„й”ҷиҜҜзҡ„еҮҪж•°жҳҜвҖңеҘҮзӮ№йҒҝе…ҚеҮҪж•°вҖқгҖӮ
жӣҙеӨҡиҜҰжғ…иҜ·е’ЁиҜўпјҡ15717506805пјҲеҫ®дҝЎеҗҢеҸ·пјү
 жү©еұ•еҠҹиғҪ
жү©еұ•еҠҹиғҪ  зҢңдҪ е–ңж¬ў
зҢңдҪ е–ңж¬ў


 775
775